1軸配列した強誘電体ナノファイバ利用による3D柔軟性を有するセンサアレイの構築
人の機械受容器の空間分布を模した人工触覚網−ロボット皮膚−の開発
目的・背景
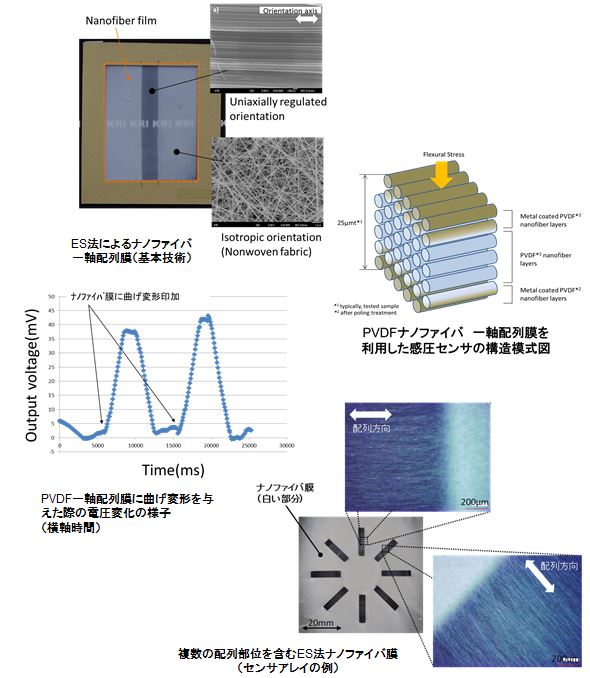
- ●圧電性フッ素樹脂を利用したナノファイバ薄膜は、適切な前処理とデバイス化により感圧センサとなり、さらに電界紡糸(ES)法の駆使により一枚の薄膜中に多数のセンサ部位を設けたセンサアレイが作成可能です。
- ●ナノファイバ感圧センサはヒトの機械受容器(FAユニット)類似の順応性を示します。センサ部位を任意に配置・パターン化した柔軟性を有する3Dセンサアレイ膜の設計により、人の機械受容器の空間分解能や分布を模した人工触覚網の形成が可能と考えます。
本技術の特徴
- 1.強誘電体ポリマーナノファイバによる圧電変換
- ・膜厚25μm(繊維径≈100nm)のナノファイバ配列膜から数10mVオーダの出力電圧が発現。
- ・ナノファイバがセンサ基本単位となり高感度(振動検出可能)
- 2.柔軟、薄膜化
- ・センサ膜は厚さ数10μmで形成可能(ヒト真皮は1-3mm厚さ)
- ・複雑形状の立体物に貼付け可能(3D追従性)
- 3.ヒト触覚網の再現
- ・ナノファイバ薄膜作成時にセンサパターンを一括形成し、人体各部におけるヒト機械受容器の分布の再現が可能
- ・電極設計からヒト触覚網に匹敵する空間分解能を得ることが可能
- ・産業利用可能な触覚網ソリューションの提供
KRIからのご提案
- ●電極設計による微小スイッチ素子を感圧センサアレイ膜に加えることで、ヒトが有する2系統の機械受容器(FA、SAユニット)が再現できます。ヒト皮膚の触覚網の再現を視野に入れた提案を行います。
- ●低弾性率エラストマーにセンサ膜を含浸させることで、センサ保護機能、複数のセンサ膜を積層含浸させたセンサ深さの設計(感度コントロール)が可能となります。ロボットや医療/介護関連デバイスへの応用を提案します。
